Have you ever wished your dustbin could open its lid automatically when you come near? In this DIY project, I’ll show you how to build a simple yet effective Smart Dustbin using an Arduino, ultrasonic sensor, and a servo motor.
This is a fun project for beginners and hobbyists that not only makes your home smarter but also teaches you about distance sensing and servo control.
Let’s get started! 👇
Component Required:
- Bucket
- Cardboad
- Servo Motor
- Arduino Uno
- Ultrasonic sensor
- 9v Battery
- Jumper Wire
Circuit Diagram:
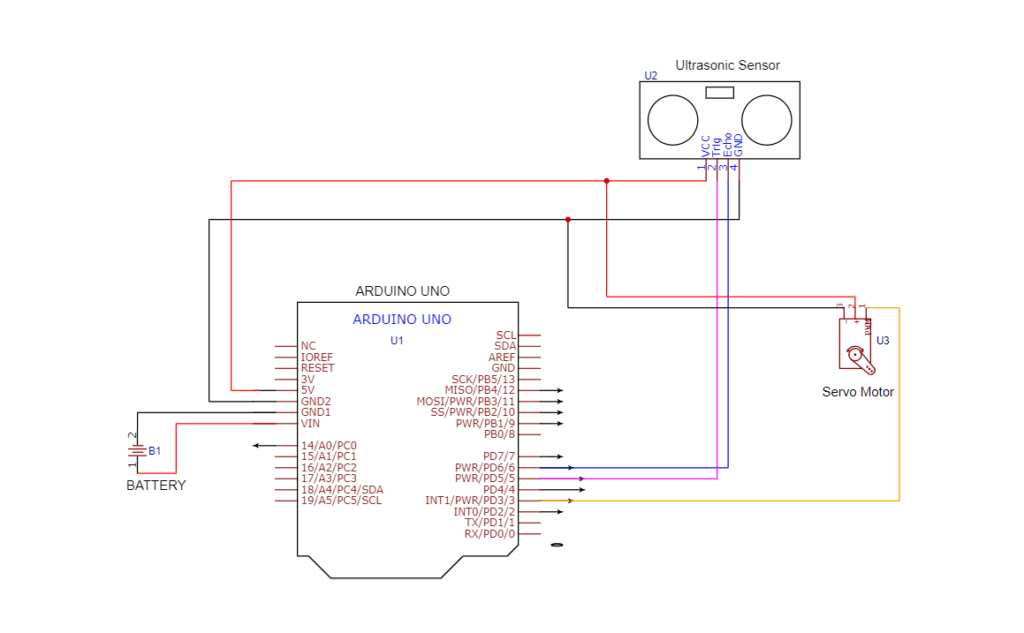
Connections:
| Component | Arduino Pin |
|---|---|
| Ultrasonic Trig | D5 |
| Ultrasonic Echo | D6 |
| Servo Signal | D3 |
| LED (+) | D10 |
| LED (-) | GND |
| Ultrasonic VCC | 5V |
| Ultrasonic GND | GND |
| Servo VCC | 5V |
| Servo GND | GND |
How It Works
- The ultrasonic sensor continuously measures the distance in front of the dustbin.
- If it detects an object (like your hand) within 5 to 30 cm, the Arduino sends a signal to the servo motor to open the lid.
- After 5 seconds, the lid automatically closes.
- An optional LED lights up when the lid is open.
Code:
#include <Servo.h>
Servo servo;
int trigPin = 5;
int echoPin = 6;
int servoPin = 3;
int led = 10;
long duration, dist, aver[3];
bool isOpen = false;
unsigned long openTime = 0;
void setup() {
Serial.begin(9600);
servo.attach(servoPin);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
pinMode(led, OUTPUT);
closeLid(); // Close lid on power up
}
void measure() {
digitalWrite(trigPin, LOW);
delayMicroseconds(5);
digitalWrite(trigPin, HIGH);
delayMicroseconds(15);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH, 30000); // 30ms timeout
if (duration == 0) {
dist = 500; // No object detected
} else {
dist = (duration / 2) / 29.1;
}
}
void loop() {
// Take average of 3 readings
for (int i = 0; i <= 2; i++) {
measure();
aver[i] = dist;
delay(10);
}
dist = (aver[0] + aver[1] + aver[2]) / 3;
Serial.println(dist);
// Open only if distance between 5cm and 30cm
if (dist > 5 && dist < 30 && !isOpen) {
openLid();
openTime = millis();
isOpen = true;
}
// Close after 5 seconds
if (isOpen && (millis() - openTime > 5000)) {
closeLid();
isOpen = false;
}
delay(100);
}
void openLid() {
digitalWrite(led, HIGH);
servo.write(0); // Adjust angle if needed
}
void closeLid() {
digitalWrite(led, LOW);
servo.write(150); // Adjust angle if needed
}
More Projects
-
Amazing LED Chaser Circuit – Beautiful Decoration Idea
LED chasers are a fun and creative way to display a sequence of lights. In this blog post, we’ll show you how to build an LED chaser using a 555 …
-

Music Reactive Light Circuit
A Music Reactive Light (also called a Sound Reactive Light or Music Sync Light) is a lighting system that changes its colors, brightness, or patterns according to the music or …
-

Mini Tesla Coil
A Tesla coil is an electrical device invented by Nikola Tesla in 1891. It is designed to generate very high voltage, low current, high-frequency electricity. In simple terms, it’s a …