An obstacle avoiding robot car is a robotic vehicle designed to navigate its environment without colliding with obstacles. It uses sensors and microcontrollers to detect and avoid obstacles in its path. These robots are commonly used in automation, robotics education, and as introductory projects for learning about electronics and programming.
Components
- Arduino Uno
- Ultrasonic Sensor (e.g., HC-SR04)
- Servo Motor
- Motor Driver Module (e.g., L298N)
- DC Motors
- Battery Pack
- Switch
- Arduino IDE
Working Principle
- Sensor Data Collection:
- The ultrasonic sensor continuously measures the distance between the robot and obstacles.
- Decision Making:
- The Arduino Uno processes sensor input.
- If the distance to an obstacle is below a threshold, the Arduino triggers a response (e.g., stop, turn left/right).
- Actuation:
- Based on the decision, the motor driver controls the DC motors to move the car forward, turn, or reverse.
Steps to Build an Obstacle Avoiding Robot Car
- Assemble the Hardware:
- Mount the motors, ultrasonic sensor, and Arduino on the chassis.
- Connect the components as per the circuit diagram.
- Write the Code:
- Write or upload the obstacle avoiding code to the Arduino using the Arduino IDE.
- Use libraries like
NewPingfor ultrasonic sensors if needed.
- Upload and Test:
- Upload the code to the Arduino Uno.
- Test the robot to ensure it detects and avoids obstacles correctly.
Circuit Diagram
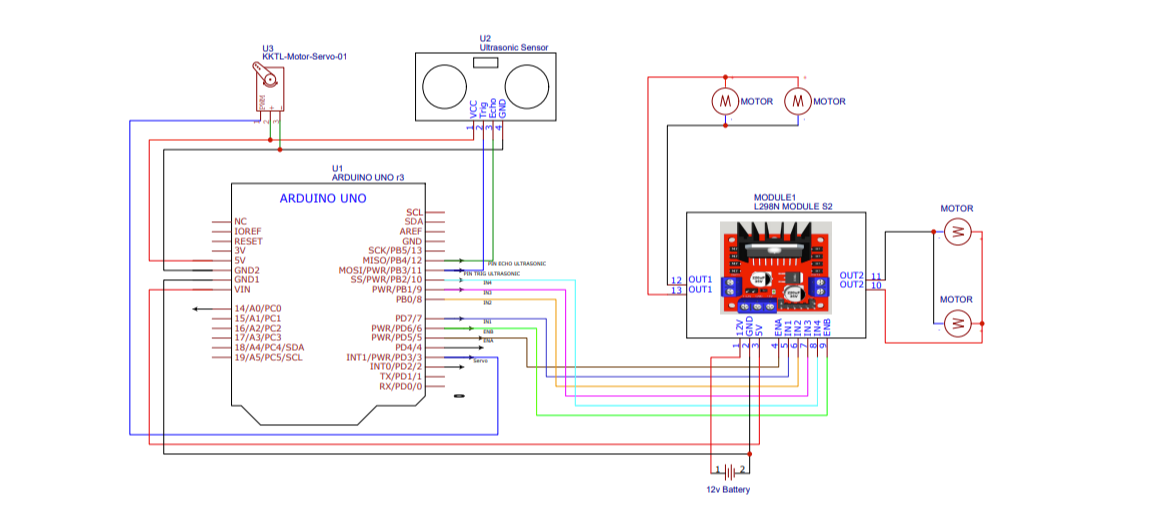
Connections
| Component | Arduino Pin | Purpose |
|---|---|---|
| Servo Motor | Pin 3 | Controls servo rotation. |
| Ultrasonic Trigger | Pin 11 | Emits ultrasonic pulses. |
| Ultrasonic Echo | Pin 12 | Receives reflected pulses. |
| Right Motor Enable | Pin 5 | Controls speed (PWM). |
| Right Motor Dir 1 | Pin 7 | Sets direction (Forward/Reverse). |
| Right Motor Dir 2 | Pin 8 | Sets direction (Forward/Reverse). |
| Left Motor Enable | Pin 6 | Controls speed (PWM). |
| Left Motor Dir 1 | Pin 9 | Sets direction (Forward/Reverse). |
| Left Motor Dir 2 | Pin 10 | Sets direction (Forward/Reverse). |
Code
#include <Servo.h>
#include <NewPing.h>
#define SERVO_PIN 3
#define ULTRASONIC_SENSOR_TRIG 11
#define ULTRASONIC_SENSOR_ECHO 12
#define MAX_REGULAR_MOTOR_SPEED 60
#define MAX_MOTOR_ADJUST_SPEED 250
#define DISTANCE_TO_CHECK 30
// Right motor
int enableRightMotor = 5;
int rightMotorPin1 = 7;
int rightMotorPin2 = 8;
// Left motor
int enableLeftMotor = 6;
int leftMotorPin1 = 9;
int leftMotorPin2 = 10;
NewPing mySensor(ULTRASONIC_SENSOR_TRIG, ULTRASONIC_SENSOR_ECHO, 400);
Servo myServo;
void setup() {
// Motor pin setup
pinMode(enableRightMotor, OUTPUT);
pinMode(rightMotorPin1, OUTPUT);
pinMode(rightMotorPin2, OUTPUT);
pinMode(enableLeftMotor, OUTPUT);
pinMode(leftMotorPin1, OUTPUT);
pinMode(leftMotorPin2, OUTPUT);
// Servo setup
myServo.attach(SERVO_PIN);
myServo.write(90); // Center the servo initially
rotateMotor(0, 0); // Stop motors initially
}
void loop() {
int distance = mySensor.ping_cm();
// If an object is detected within the threshold distance
if (distance > 0 && distance < DISTANCE_TO_CHECK) {
rotateMotor(0, 0); // Stop motors
delay(500);
rotateMotor(-MAX_MOTOR_ADJUST_SPEED, -MAX_MOTOR_ADJUST_SPEED); // Reverse
delay(200);
rotateMotor(0, 0); // Stop motors
delay(500);
// Rotate the servo to the left and check the left side distance
myServo.write(180);
delay(500);
int distanceLeft = mySensor.ping_cm();
// Rotate the servo to the right and check the right side distance
myServo.write(0);
delay(500);
int distanceRight = mySensor.ping_cm();
// Return the servo to the center position
myServo.write(90);
delay(500);
// Handle invalid distance readings (0 means no reading)
if (distanceLeft == 0) distanceLeft = 999; // Large value if no valid reading
if (distanceRight == 0) distanceRight = 999;
// Decide on which way to turn based on the side distances
if (distanceLeft > distanceRight) {
rotateMotor(MAX_MOTOR_ADJUST_SPEED, -MAX_MOTOR_ADJUST_SPEED); // Turn left (more space on the left)
delay(200);
} else {
rotateMotor(-MAX_MOTOR_ADJUST_SPEED, MAX_MOTOR_ADJUST_SPEED); // Turn right (more space on the right)
delay(200);
}
rotateMotor(0, 0); // Stop motors
delay(200);
} else {
// If no obstacle in front, move forward
rotateMotor(MAX_REGULAR_MOTOR_SPEED, MAX_REGULAR_MOTOR_SPEED);
}
}
// Function to control motor rotation based on speed
void rotateMotor(int rightMotorSpeed, int leftMotorSpeed) {
// Right motor direction
if (rightMotorSpeed < 0) {
digitalWrite(rightMotorPin1, LOW);
digitalWrite(rightMotorPin2, HIGH);
} else {
digitalWrite(rightMotorPin1, HIGH);
digitalWrite(rightMotorPin2, LOW);
}
// Left motor direction
if (leftMotorSpeed < 0) {
digitalWrite(leftMotorPin1, LOW);
digitalWrite(leftMotorPin2, HIGH);
} else {
digitalWrite(leftMotorPin1, HIGH);
digitalWrite(leftMotorPin2, LOW);
}
// Set motor speeds
analogWrite(enableRightMotor, abs(rightMotorSpeed));
analogWrite(enableLeftMotor, abs(leftMotorSpeed));
}Applications
- Automation:
- Useful in factories and warehouses for autonomous navigation.
- Education:
- A great project for learning robotics and Arduino programming.
- Hobbyist Projects:
- Popular among robotics enthusiasts for DIY projects.
- Research:
- Basis for advanced navigation and AI-based robots.
More Project
-
Amazing LED Chaser Circuit – Beautiful Decoration Idea
LED chasers are a fun and creative way to display a sequence of lights. In this blog post, we’ll show you how to build an LED chaser using a 555 …
-

Music Reactive Light Circuit
A Music Reactive Light (also called a Sound Reactive Light or Music Sync Light) is a lighting system that changes its colors, brightness, or patterns according to the music or …
-

Mini Tesla Coil
A Tesla coil is an electrical device invented by Nikola Tesla in 1891. It is designed to generate very high voltage, low current, high-frequency electricity. In simple terms, it’s a …